On September 8, IEEE Spectrum, flagship magazine of IEEE, reported online the latest research findings on wearable robots of Prof. Xiong Caihua’s team of the State Key Laboratory of Digital Manufacturing Equipment and Technology of MSE. Title of the report was “This Motorized Backpack Eases the Burden for Hikers”.

To discover the secrets of human motion, and augment the performance of loaded walking with engineering-scientific methods, thus realizing the second revolution of walking, is one of the most important scientific targets in the interdisciplinary research of human-machine integration. Wearable robots, as the equipment of assisting and improving the loaded walking capacity, are the carriers of this key scientific research, which have been the research frontier with national development priority of developed countries and areas such as the US and the EU.
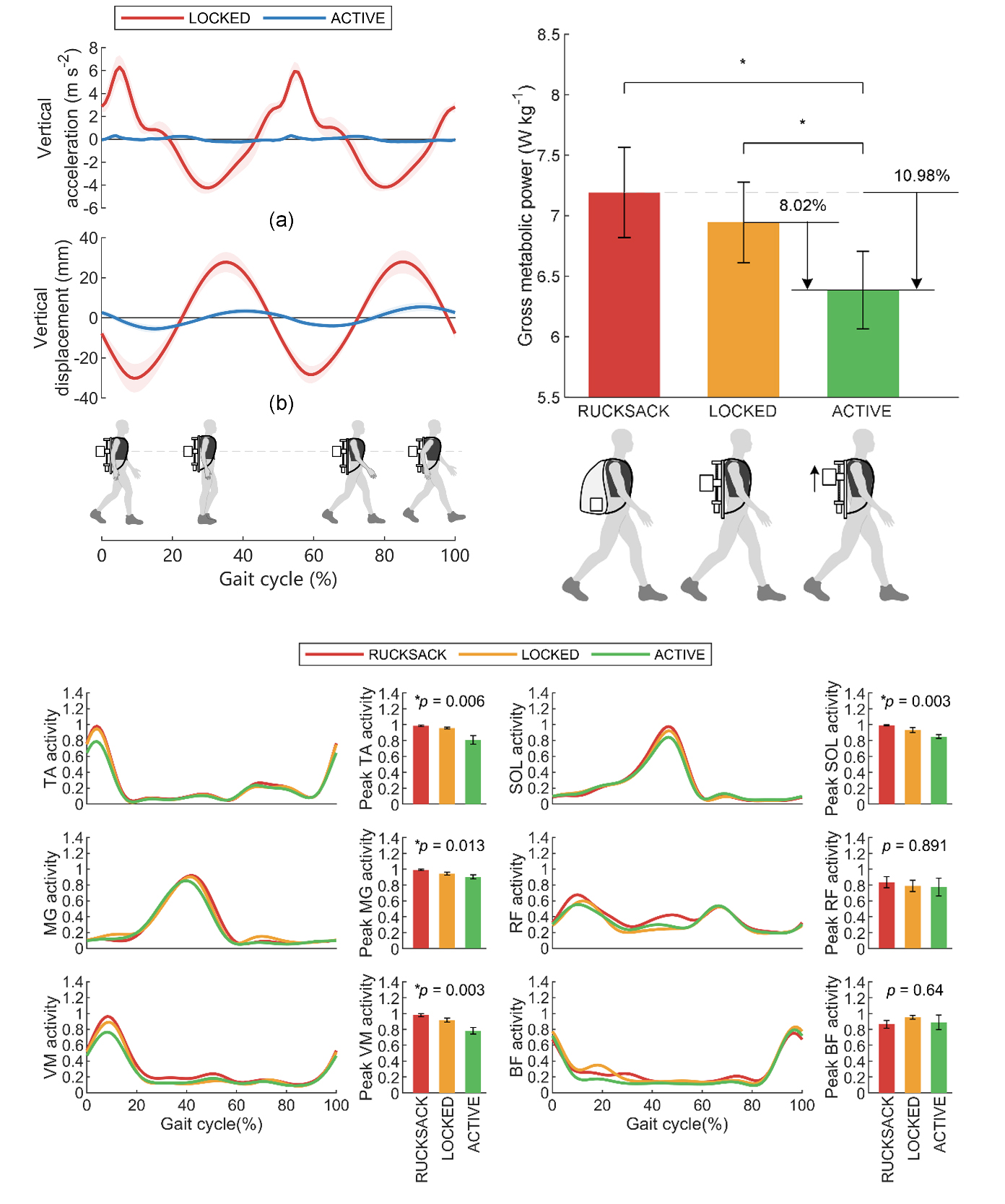
Aiming at the target of carrying loads with less metabolic cost, Prof. Xiong Caihua’s team carried out systematic research with an acceleration-controlled load (ACTIVE) backpack. Inspired by events such as people using flexible bamboo poles to carry bulky goods to reduce exertion, the team proposed a design theory and method of an active backpack which accounted for the inertial forces of the bag against a backpacker’s body as the person walks, reducing the metabolic energy demand on the user. The backpack, which weighs 5.3 kgs, was designed to carry loads up to 30 kgs. It has two different modes, namely the active mode and the passive mode. In its passive mode, two symmetrically arranged elastic ropes balance the weight of load within the backpack. When the user turns on the system’s active mode, a rotary motor regulates the acceleration of load. The experiment result showed that the motorized backpack in active mode reduced the load acceleration by 98.5 percent on average. This decreased the energy demand on the user by 11 percent compared with the conventional rucksack. The energy savings in passive mode came in at 8 percent on average.
This research provided new principle and method for enhancing and expanding human motion ability with engineering science.
This work was supported in part by the National Natural Science Foundation of China under Grant 91648203. It was also part of the Major Research Program “The Basic Theory and Key Technologies of Tri-co Robots” charged by Academician Ding Han of MSE, so the research was guided and supported all the time by Academician Ding and experts of his team.
Link of the report:
https://spectrum.ieee.org/tech-talk/consumer-electronics/portable-devices/this-motorized-backpack-eases-the-burden-for-hikers