On January 13, IEEE Transactions on Robotics, a top journal in robotics field, published online the latest research findings of Prof. Li Wenlong and Academician Ding Han’s team of the State Key Lab, with the title “Simultaneous calibration of multi-coordinates for a dual-robot system by solving the AXB=YCZ problem”. MSE doctoral student Wang Gang was the first author and Prof. Li Wenlong the corresponding author. Dr. Liu Xingjian from the Robotics Institute of University of Toronto and Academician Ding Han of MSE were also authors of the paper.
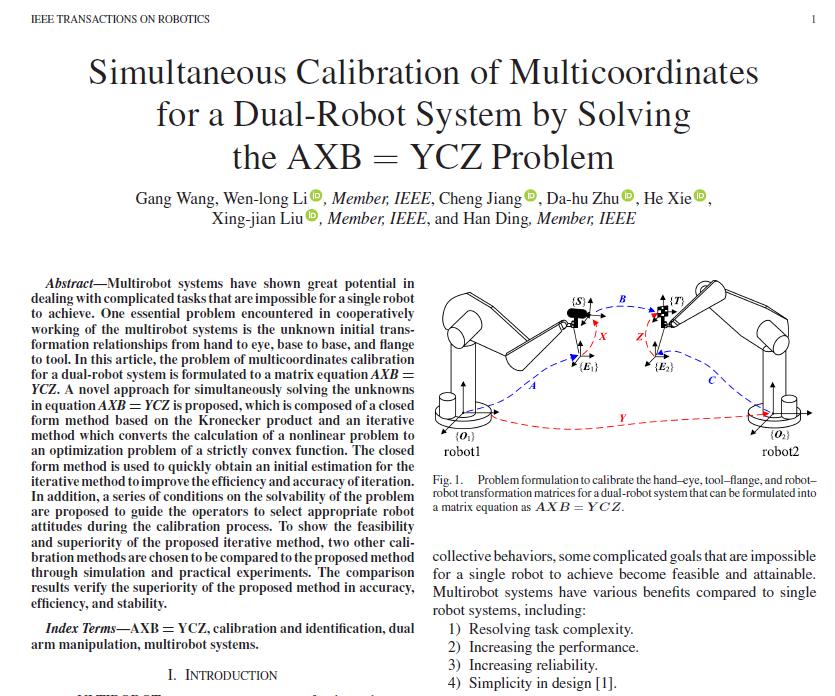
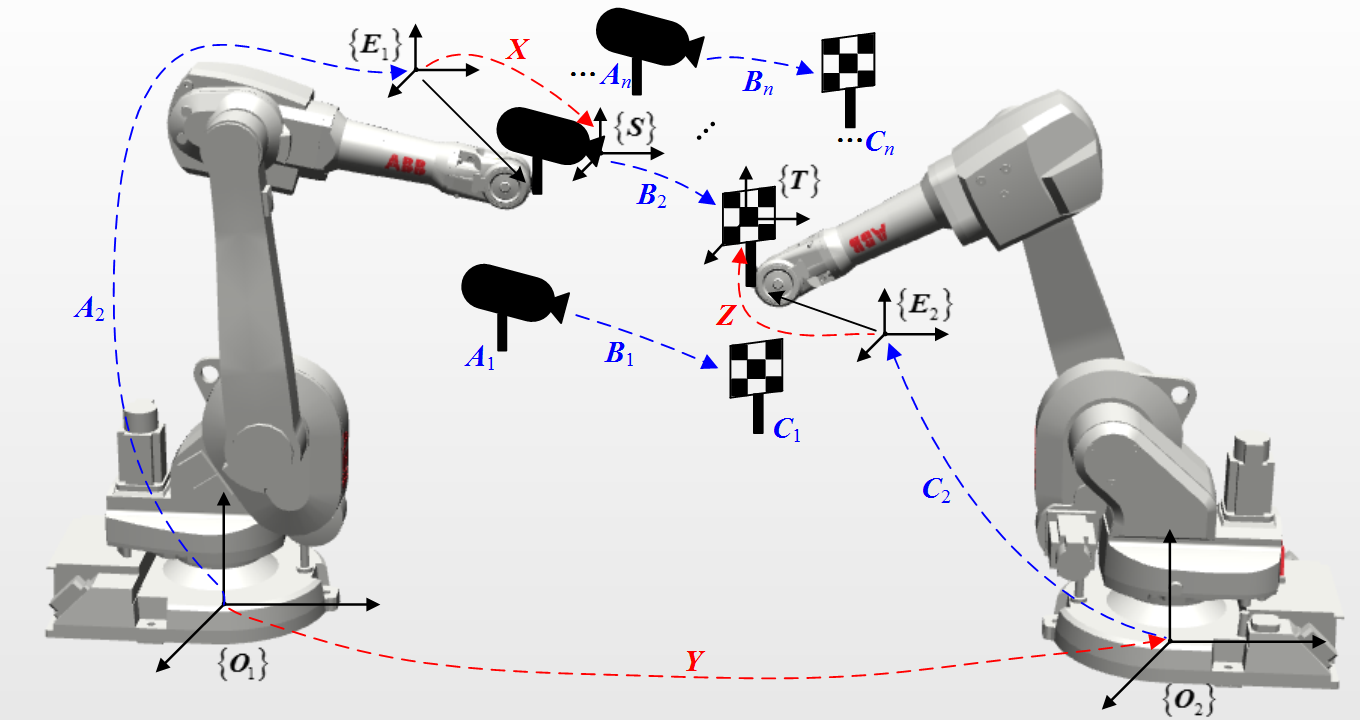
Multirobot systems have shown great potential in dealing with complicated tasks that are impossible for a single robot to achieve. One essential problem encountered in cooperatively working of the multirobot systems is the unknown initial transformation relationships from hand to eye, base to base, and flange to tool. In this article, the problem of multicoordinates calibration for a dual-robot system is formulated to a matrix equation AXB = YCZ. A novel approach for simultaneously solving the unknowns in equation AXB = YCZ is proposed, which is composed of a closed form method based on the Kronecker product and an iterative method which converts the calculation of a nonlinear problem to an optimization problem of a strictly convex function. The closed form method is used to quickly obtain an initial estimation for the iterative method to improve the efficiency and accuracy of iteration. In addition, a series of conditions on the solvability of the problem are proposed to guide the operators to select appropriate robot attitudes during the calibration process. To show the feasibility and superiority of the proposed iterative method, two other calibration methods are chosen to be compared to the proposed method through simulation and practical experiments. The comparison results verify the superiority of the proposed method in accuracy, efficiency, and stability.


This work was supported in part by National Natural Science Foundation of China under Grant 51535004 and Grant 52075203, in part by Hubei Province Key Research and Development Plan under Grant 2020BAA025. As an important part of the Major Research Plan “Basic Theories and Key Technologies of Tri-Co Robots”, the work has always been guided by Academician Ding Han and experts of his team.
Link of the paper: https://ieeexplore.ieee.org/document/9319563