On September 1st, IEEE Transactions on Robotics, a top journal in the robotics field, published online MSE Prof. Bai Kun’s latest research findings on spherical wrist, with the title of “Spherical Wrist With Hybrid Motion-Impedance Control for Enhanced Robotic Manipulations” (DOI: 10.1109/TRO.2021.3099310). Prof. Bai Kun is first author of the paper.
Cooperative robots have replaced part of human work in more and more fields, but it is difficult to achieve the ability of human hands in many smart and fine operations. Bionics and robot-related researches show that dexterous wrist can contribute more than a highly dexterous end-effector with limited wrist capability. Due to the lack of dexterous wrist joint with perceptual compliance, the existing mechanical manipulator based on mechanical transmission is the bottleneck that hinders the progress of robots to improves their fine operation capability.
In order to synthetically impose both motion accuracy and active compliance for dedicated wrist manipulations, a hybrid motion/impedance control method is proposed for a spherical wrist to perform human-wrist-like manipulations with intuitive fusion of precise motion and adaptable compliance.
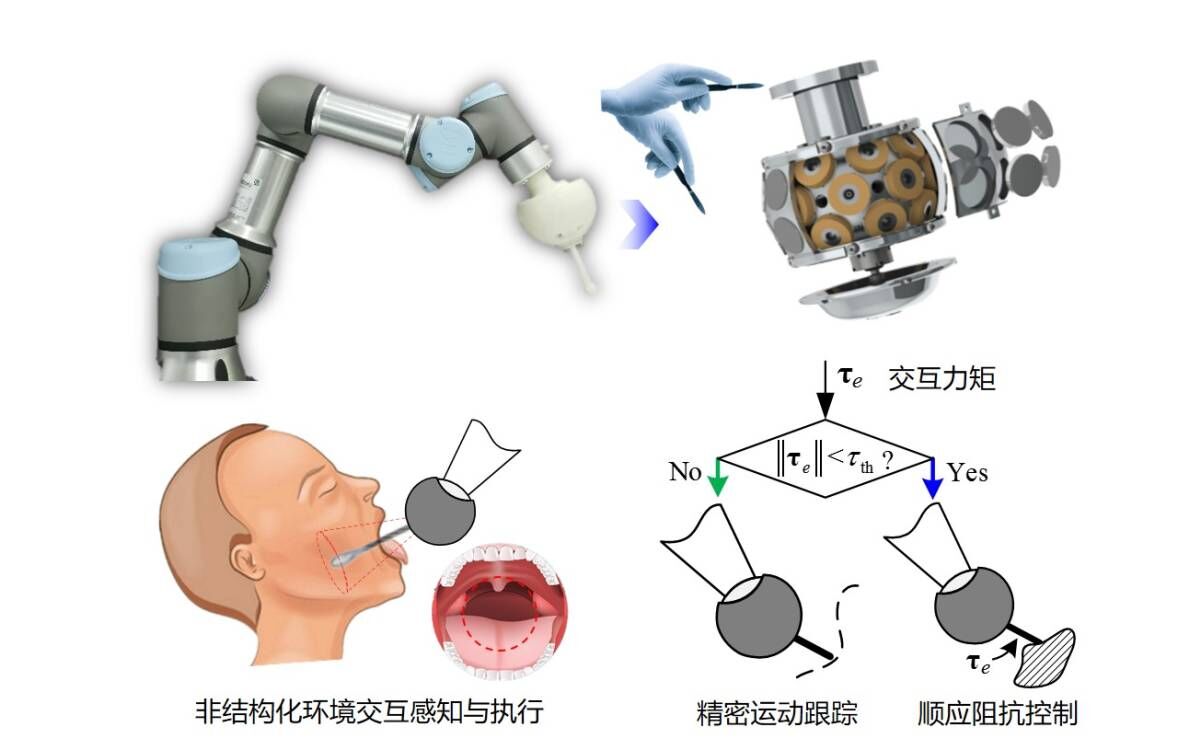
This article presents a robotic wrist configured with a spherical joint and hybrid motion/impedance control for providing dedicated manipulations in wrist space. The hybrid control allows the system to switch between motion control and impedance control autonomously to synthetically impose motion accuracy (for fine manipulations) and active impedance (for compliant manipulations). The proposed control was also featured with a torque-based rule that allows intuitive switching between different modes as well as a torque observer that eliminates the need of force/torque sensors in the control loop. The concept feasibility has been validated on a spherical wrist test-bed in the context of throat swabbing. The results show that the spherical wrist provides not only a kinematically effective configuration for robotic manipulators, but also a functionally efficient means for rendering human-wrist manipulation capabilities. Formulated based on a general form of rotor dynamic model, the proposed control method was also expected to provide a basis for implementing hybrid motion-impedance control for other multi-DOF systems (not only the spherical wrist) in the context of interactive manipulations
This work was supported by National Natural Science Foundation of China under Grant 51675194 and Grant U1713204.
Link of the paper: https://ieeexplore.ieee.org/document/9513569