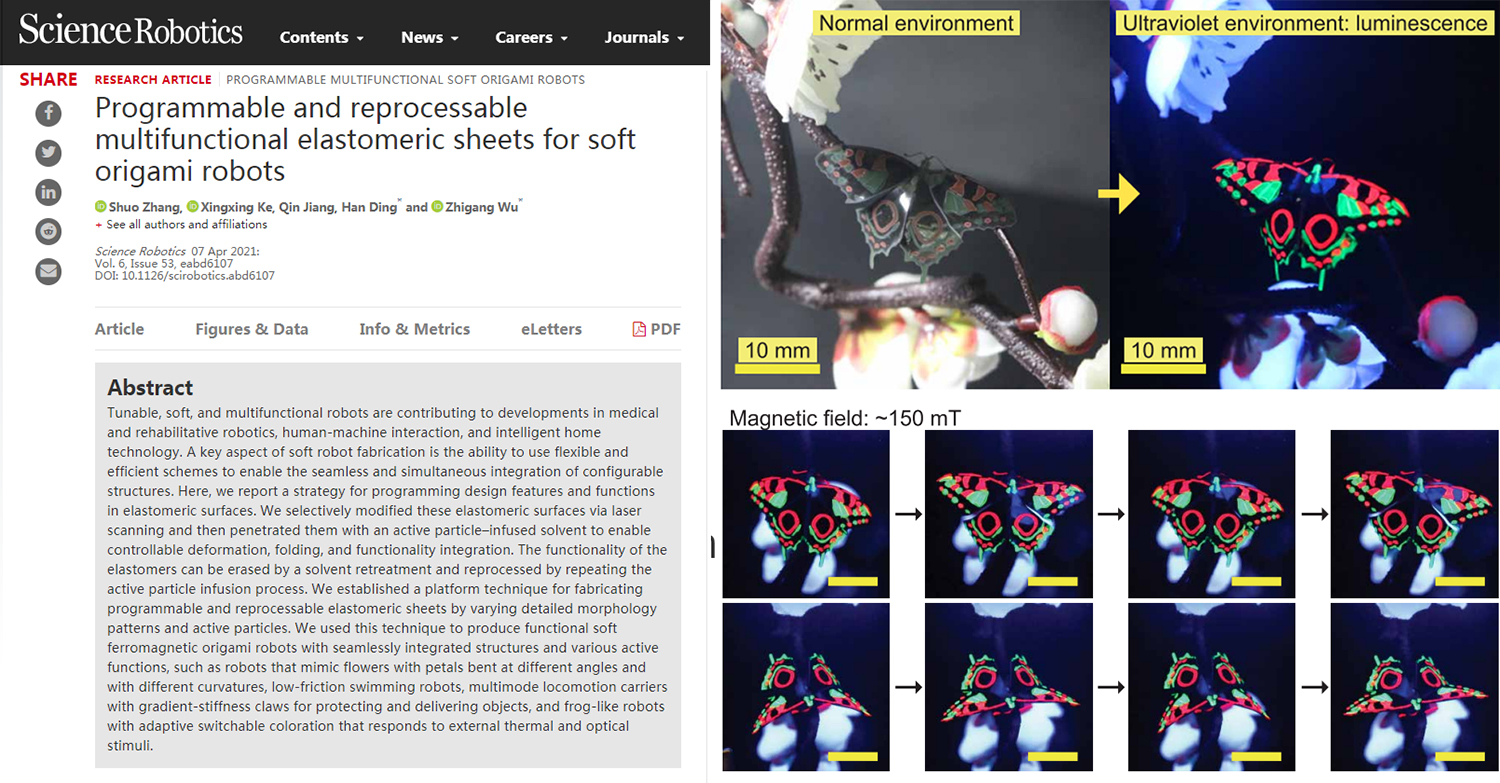
On April 7, Academician Ding Han and Prof. Wu Zhigang’s team of MSE published their latest research findings in a top journal of robotics field, Science robotics (IF=18.648), with the tile “Programmable and reprocessable multifunctional elastomeric sheets for soft origami robots". The team developed a new soft origami robots manufacturing process with the integration of structures and functions that was programmable and reprocessable, realizing the integration and feedback of multi-functional modules for soft robots, thus improved their physical intelligence. This is the first time that HUST has published research achievements in Science robotics. Zhang Shuo, a doctoral student of the team, was the first author of the paper, and Academician Ding Han and Prof. Wu Zhigang were co-corresponding authors.
It has always been the goal for scholars in related fields to combine the structure and function of soft robots to empower them with higher intelligence. This not only enables soft robots to interact more freely with humans and the natural environment, achieving active and passive adaptation, feedback stimulation and even active planning and self-evolution, but also provides a broad development basis and ideas for the integration and interaction of different cross fields.
The research developed a facile technique for rapidly fabricating soft ferromagnetic 3D origami robots with programmable and reprocessable structures, actuation, and functions from 2D elastomeric sheets by combining selective tuning surface morphology using an ultraviolet (UV) laser and penetrating them with an active particle–infused solvent. The constructed function and shape can be erased and restored in suitable solvent for the reprocessing and reconstruction of the structure, function and gait. The series of soft origami robots integrated with multi-functional modules displayed showed certain passive feedback and perception ability to different external stimuli.
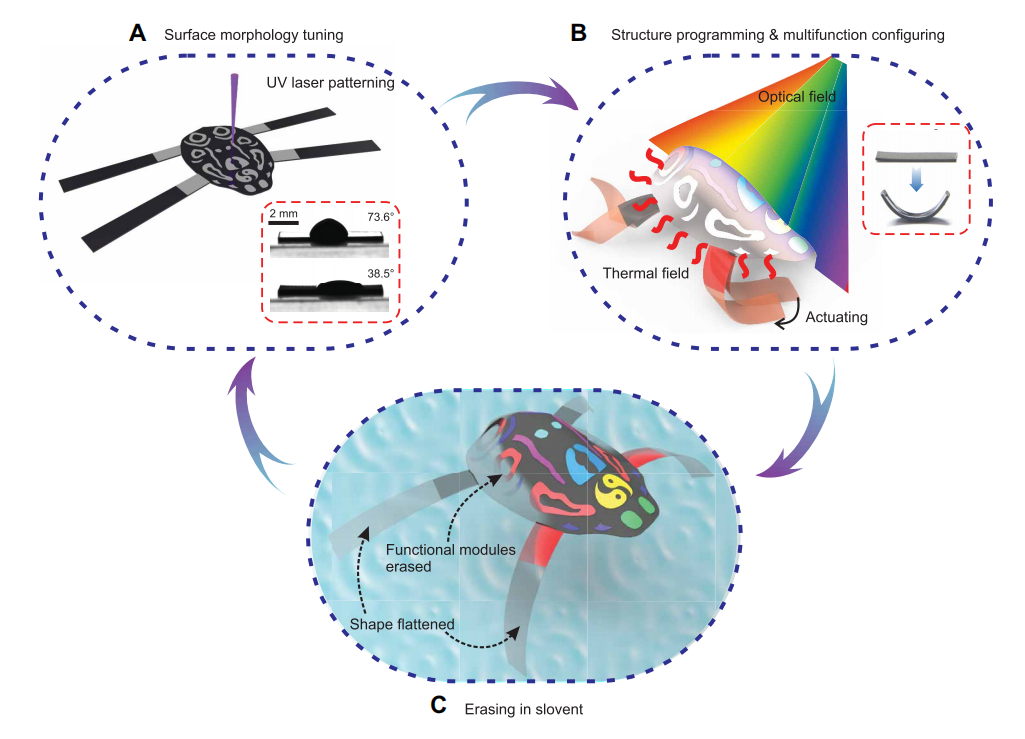
The technology of the research can help the structure and function be simultaneously programmable and reconfigurable with minimal costs, which provides a new processing idea for the integration of structure, perception and drive of soft robots, and is expected to improve the physical intelligence and mechanical intelligence of soft robots.
The research was supported by National Natural Science Foundation of China and National Key Research & Development Program.
Link to the paper:https://robotics.sciencemag.org/content/6/53/eabd6107