On February 26, the top-tier journal in the field of robotics, International Journal of Robotics Research (IJRR, with an annual publication volume of 80-90 articles), published the latest research paper by Academician Ding Han's team from the State Key Laboratory of Digital Manufacturing Equipment and Technology at our institute. The paper, titled "Direct Visual Servoing Based on a New Basis Set and Switching Strategy," represents three years of effort and spans 39 pages in a two-column format. Reviewers praised the work as a "quite elegant method" and a "considerable innovation in the field." The paper was recommended for publication by Dr. Luca Carlone, Senior Editor of the journal, and Professor Tat-Jun Chin, Associate Editor. The State Key Laboratory of Digital Manufacturing Equipment and Technology of our college is the sole completing unit of the paper. PhD student Yin Yecan and Assistant Researcher Li Xiangfei are co-first authors, Professor Zhao Huan is the corresponding author, and Academician Ding Han, Master's student Ning Wenbo, and Assistant Researcher Wang Yiwei are co-authors.
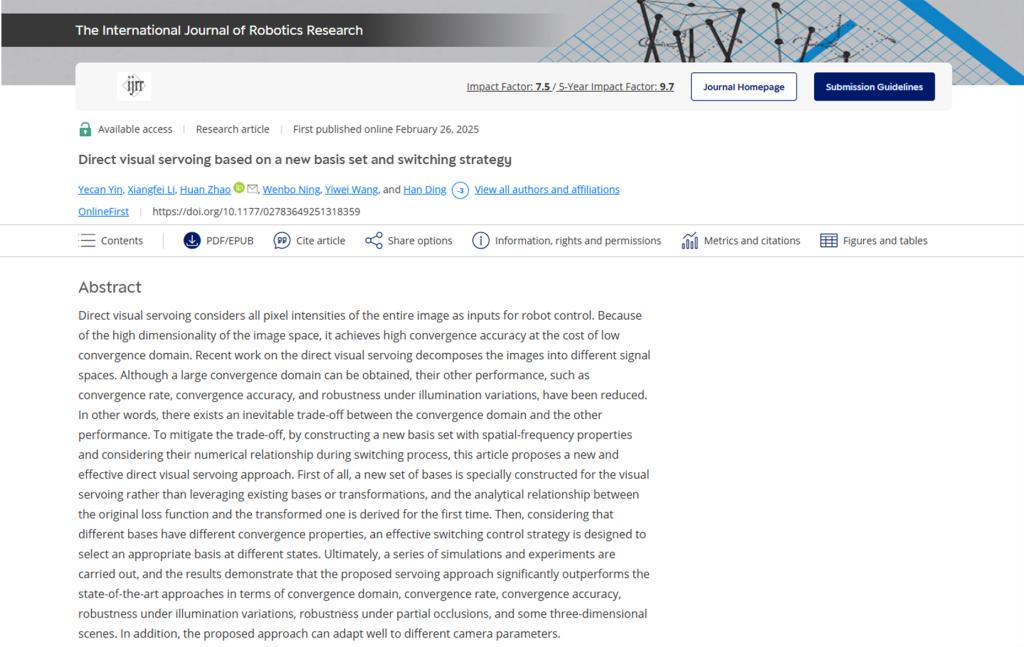
Visual servoing technology is widely used in robot assembly, manipulation, and other fields. Direct visual servoing, known for its high precision, is a reliable solution for meeting the demands of high-precision flexible positioning and posture adjustment in robotics. However, due to the high dimensionality of images and the complexity of image operations, the lack of relevant theoretical advancements over the decades has limited visual servoing to only ensuring local convergence with unknown convergence domain boundaries. This has significantly restricted its application in robotic tasks. The paper proposes, for the first time, a theoretical model for convergence domain analysis. Combined with this model, a new basis set representation of images in the time-frequency domain is constructed. By considering the scale and directional characteristics of different filters in the basis set, an appropriate basis is selected at the right time (or state), thereby creating a switching strategy on the basis set. This achieves comprehensive improvements in the convergence domain, convergence speed, convergence accuracy, and robustness to illumination variation/occlusion in direct visual servoing. It alleviates the significant contradictions between the convergence domain and other convergence performance metrics in existing work, providing a solid theoretical foundation for advancing direct visual servoing toward practical applications.
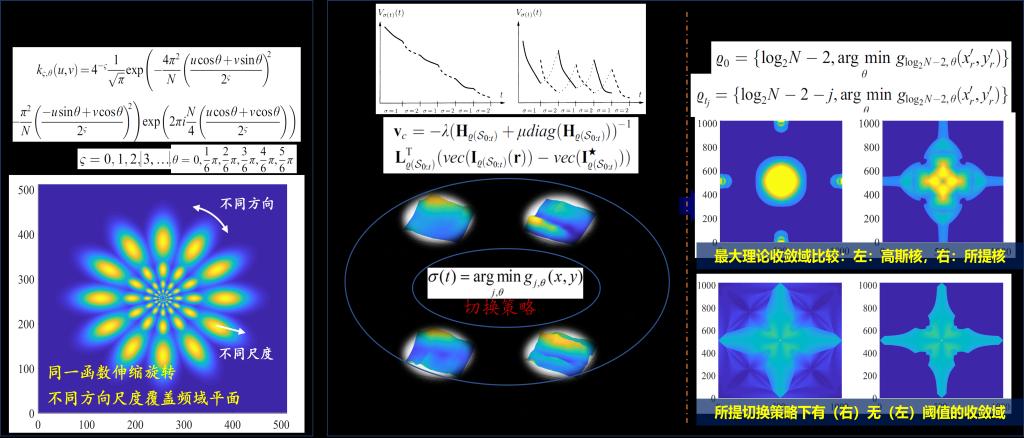
The main research content of this article
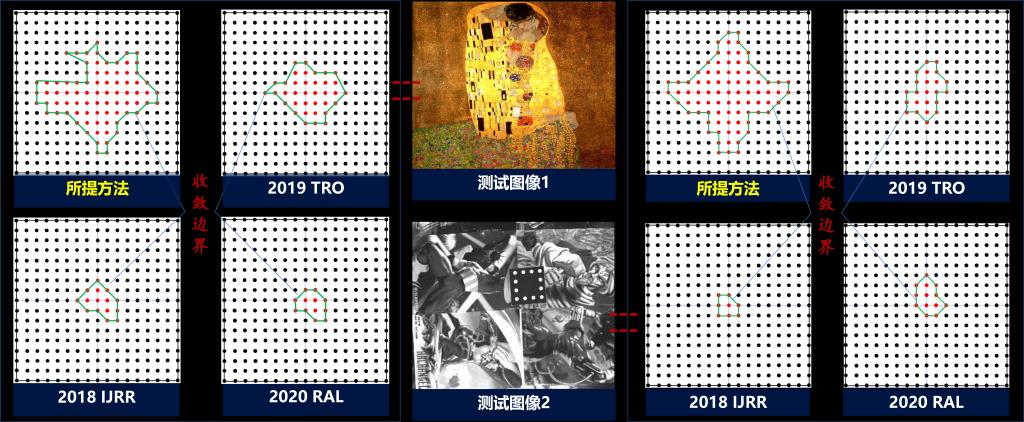
Comparison of convergence domains between the proposed method and the current state-of-the-art methods
This research work has been supported by the National Natural Science Foundation of China's Outstanding Research Group, Major Project, Joint Fund Project, and Youth Project.
Link to the paper: https://journals.sagepub.com/doi/10.1177/02783649251318359